
Service phone:(+86)4008-29-4008

Service phone:(+86)4008-29-4008

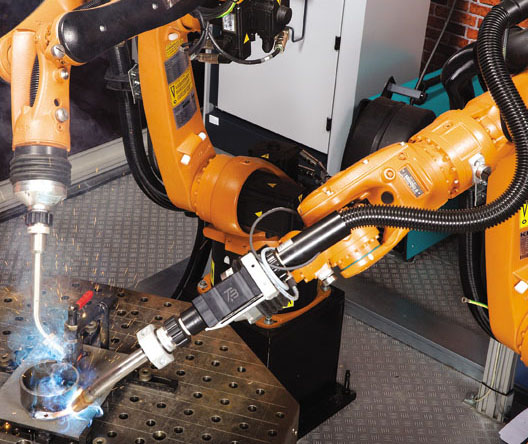
Since the designed welding robot works in a quasi-planar, narrow space environment, in order to ensure that the robot can track the weld automatically according to the deviation information of the arc sensor, it is required that the designed robot should be compact in structure, flexible in movement and stable in work. According to the characteristics of the narrow space, a small mobile welding robot is developed. According to the movement characteristics of each structure of the robot, using a modular design method, the robot mechanism is divided into three parts: a wheeled mobile platform, a welding torch adjustment mechanism and an arc sensor. Among them, the wheeled mobile platform is mainly used for coarse tracking of welds due to its large inertia and slow response. The welding torch adjustment mechanism is responsible for precise tracking of welds, and the arc sensor completes real-time identification of weld deviations. In addition, the robot controller and motor driver are integrated on the robot mobile platform, making it smaller. At the same time, in order to reduce the impact of dust on moving parts in the harsh welding environment, a fully enclosed structure is adopted to improve its system reliability.

Shenzhen Headquarters Address: Building 7-B, District B, Renmin Middle Road, Kengzi Street, Pingshan District, Shenzhen
Consulting Tel: (+86)4008-29-4008
Sales Email: yuzhi@cieszs.com

